

The Charity
Aviation
Maritime
Close quarters at Luanda Roads

Initial Report
 Report Text:
Report Text:

A vessel in transit in the Roads outside the port of Luanda, Angola. Vessel ‘SR’ was seen to transit the busy anchorage at high speed and when encounter ing a vessel in a close quarters situation, did not comply with the Collision Regulations. This non-compliance with the regulations required our ship to take immediate avoiding action by altering course to port and placing our engine astern in order for the MV SR to pass ahead and avoid a collision. Weather conditions were light airs with good visibility.
From 3rd Party Ship Manager:
Thanks for your message, the Master of MV SR, would like to take this opportunity to explain the situation:
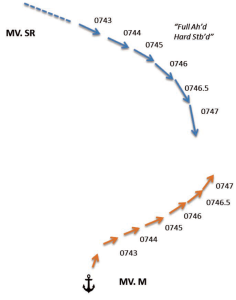
“MV SR had permission from Luanda port control to proceed to the inner bay anchorage for port clearance: We passed through the inbound road proceeding to the inner bay with a speed of about 7knots. At that time, MV M was anchored at West of Ilha do Cabo island. At about 0723, I observed MV M move in a direction NNE with speed about 2 knots and it appeared she wanted to cross the road to the North. After 5 minutes, I observed the compass bearing of MV M was increasing and at 0732, the compass bearing with MV M was still increasing: I thought she will passing across my stern. At 0740, our speed was 7.1 knots heading 120°, MV M’s speed was 4.0kts heading 074° and on VHF we communicated with each other. I told MV M that: “I am inbound vessel proceeding inner bay to drop anchor, I want to pass across your bow then alter course to starboard, can you alter your course to port side to passing my stern?” MV M answered: “You want to pass my bow, OK, copy that.” At 0743, I observed that MV M altered course to port side not obviously, her speed 4.0 knots heading 071°, so I called her again on VHF asking them to alter course to port side more quickly, she answered: “I am altering slowly.”
In that situation, it is impossible for me to reduce speed or to alter course to port side, so I in crease our main engine to full ahead, and at 0745, I ordered steer “hard to starboard” and alter course in order to pass the bow of MV M with Closest Point of Approach (CPA) 0.19 nm.
In summary: Before passing the bow of MV M, I had to get permission from MV M and she agreed. If she had not agreed to my passing her bow, I would reduce speed and alter course to pass her stern; but the Master of MV M agreed with my intention to pass her bow, but did not make substantial action in good time to alter course to port.
In conclusion: I should apologize that I was not fully compliant with the COLREGs and the cause for this closequarters situation. First, I should proceed at safe speed. Second, I should take early action to avoid the risk of collision. Third, I should take action as the give-way vessel and avoid crossing ahead of the other vessel in a crossing situation, even if have a communication with other vessel in advance. And I promise that in the future, I will organize the OOW with me to study the COLREG and full comply with the COLREG.”
CHIRP believes the captain of MV SR provided a very com – prehensive reply to the report with a remedial action plan that was soon completed. CHIRP used the information taken from MV SR’s Voyage Data Recorder to create a schematic view of the vessels’ tracks.
CHIRP Comment
The greatest care needs to be exercised for collision avoidance between vessels moving within an anchorage. Visual bearings and Automatic Radar Plotting Aid (ARPA) derived CPA information will be based on inaccurate data and cannot be relied upon to avoid collision. This is due to the nature of the location and where both vessels will be either slowing down or speeding up. ARPA and visual bearing information will be immediately dated and cannot be safely used for reliably predicting future out comes compared to open sea constant speed scenarios. It will be appreciated that ARPA derived CPA information is based upon two lots of continually changing triangulation information, where in this instance speeds are slower, more variable and have consequent larger constantly changing predictions. Radar ARPA is best effective on true vector outputs to monitor the status of all anchored vessels, which will show a nil vector and hence stopped. Radar “trails” should be set up so these will give the first indication of a vessel moving, or starting to move, within the anchorage. By such means stopped vessels will not become collision distractions provided that best practice of a longer route approach is followed to the anchorage, parallel to anchored vessels, in order to stem current/ wind/tide. This will ensure close quarters situations are minimised and avoid suffering the effects of set. Exiting anchorages should always be done parallel to the vessels and ahead until well clear of the anchored vessels so as to avoid passing closely ahead and setting down. Vessels moving within the anchorage should therefore always be on parallel and not converging courses. Where this is unavoid able, set is difficult to manage, particularly at slow speeds: crossing the direction of anchored vessels will inevitably create collision scenarios with other vessels moving within an anchorage. The risk of collision is much greater within an anchorage than in open sea and more challenging to predict. Conventional means become less effective in the accuracy of predicting outcomes. Avoid the use of VHF to gain intent. This often creates more confusion than clarity.
Taking guidance from the above will minimise this risk. The golden rule of never passing ahead of an anchored vessel is aspirational in many instances as we know, however it not only avoids setting down onto vessels at anchor, it also excludes converging collision courses with ships in the anchorage area as we will all be going in the same direction either in or out of the anchorage!
Readers may also refer to the good practice advocated in The Nautical Institute’s ‘Navigator’ magazine edition 02: Avoiding Collisions – Published February 2013.