FEEDBACK

The perils of unintentional BVLOS

Our reporting process is simple and quick using either our website portal or our App (scan the appropriate QR code shown below or search for ‘CHIRP Aviation’ – avoiding the birdsong apps that come up!). In our reporting portal you’ll be presented with a series of fields to complete. Fill in as much as you feel is relevant – not every field is mandatory, but the more information you can give us the better. Although you’ll need to enter your email address to get access to the portal so that we can screen out bots etc, none of your details are shared outside CHIRP, and we have our own independent secure database and IT systems to ensure confidentiality. That way you can help to improve safety by sharing important lessons without worrying about possible consequences. Anything that could identify a reporter is removed from our reports before progressing or publishing them, and we liaise with the reporter in every step of the process. Each report plays its part in raising awareness of important safety issues and wider trends and provides lessons for all to learn from. Report-by-report we can make aviation safer – as our strapline says,
“you report it, we help sort it.”

We always welcome readers’ comments on what we produce. Whilst we try and keep an eye on social media sites, it is not always possible to keep track of the multitude of Drone-related sites and what is being discussed. Do therefore feel you can email us directly with your Human Factors or Just Culture related comments on the reports we write about at mail@chirp.co.uk
A reader contacted us to tell us that he was going to do a blog about HF. We fully supported his initiative and have added a link to what he posted. Many thanks for spreading the word Simon Adams from Heli Tele! The link is here: Insights and Updates on Drone Technology | Heli-Tele Blog
Incidently, we look forward to seeing all those that can make it to this year’s ‘Drone Industry Flyin’ on the 28th September. Drone Flyin – Where Industry Meet Pilots, and Technologies
Pooleys have kindly agreed to support CHIRP’s fund-raising activities by allocating us a discount code on their website shop. Enter the code ‘Chirp’ (case sensitive) at the appropriate point at the payment stage to get 5% discount and generate some commission for CHIRP. Sadly, this doesn’t apply to the purchase of Bose headsets, but everything else qualifies! If you do use Pooleys for your purchases, or know other people who do, please do share the code. The more the code is circulated, the more it is used and the greater the commission generated to help CHIRP build its resources to do more.
![]()
Rupert Dent
Drone/UAS Programme Manager
Contact:
-
DUAS XX26
–

Initial Report
Report A
Please select all appropriate options from below.
The occurrence involved a high risk of injury to people
The occurrence involved operating less than 50m from uninvolved people
The unmanned aircraft flew beyond visual line of sight and was recovered
Give full details of the occurrence stating fully how it happened:
The model in question is a Freewing MIG29 EDF foam model with twin 80mm fans. It flies on 2 x 6S 6000mAh lipos. I have flown it many times and had already flown it once on the day of the occurrence with no issues. I had been flying the model for about 1/2 a normal flight so about 2 minutes. I flew along the XXX field at about 50 feet and pulled up over the field at the western end with the intension of turning left by rolling to the right, followed by a turn to the left. As I rolled the model stopped inverted, motors cut, and it entered a shallow glide slightly northwest in the direction of the motorway. The glide was stable, and I had no further control.
The model disappeared over the tree line. After an extensive search in the field to the northwest of the XXX field, I took the decision to push through the bushes which line the top of the motorway embankment and when standing in the open I could see the model still inverted and under the Armco barrier on the opposite side of the motorway. There were no stopped cars or persons near the model. After returning to the flying field, I took the car around to the other side of the motorway and eventually recovered the model. As these high power EDF models do not have a very long flight time of around 3-4 minutes and this varies greatly depending on the use of throttle, I always fit a Spektrum energy sensor which indicates verbally how much energy in mAh I have used every 10 seconds of flight. Unfortunately, this sensor was supplied with two EC3 connectors and my lipos have EC5 connectors so I replace the two plugs and leads. I do this by removing the existing wires and connectors and using a commercially purchased lead assembly with 200mm of lead with a female EC5 on one end and a male EC5 on the other. I cut the black lead in the centre and solder in the current sensor. The female EC5 is then plugged into the ESC and the male into the Lipo connector. On recovery of the model i found that the positive wire in the male EC5 connector which forms part of the purchased lead had come loose due to a dry or poor solder joint. This caused the supply to the BEC to fail shutting down the radio and both fans.Estimated distance from flight area (point of launch) to occurrence location
400m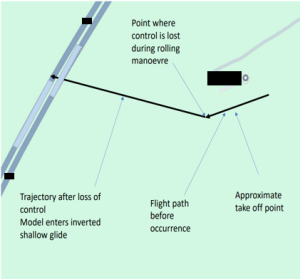
Report B
Please select all appropriate options from below.
The unmanned aircraft flew beyond visual line of sight and was recovered
Give full details of the occurrence stating fully how it happened:
Model Aircraft incident XXXX. Time 11.40am approx. Eight flight had previously been flown, and at take-off the met conditions were fine for flying. The model flew a circuit however; a bank of sea fog rapidly blew across the flying site. Pilot endeavoured to carry out a quick return and land as soon as possible but visual contact was lost. Accordingly, the pilot cut the power and made a note of the direction in which the model was last seen. The model was subsequently found in an empty horse paddock. There was no injury or damage to property.Report C
Please select all appropriate options from below.
The unmanned aircraft flew beyond visual line of sight and was not found
Give full details of the occurrence stating fully how it happened:
1.5m foam glider (e-flite Conscendo) entered updraft/thermal with S/W wind Approx 10-15mph) quickly became beyond line off site with control single loss.
Estimated distance from flight area (point of launch) to occurrence location
1.5 kilometreCHIRP Comment
-
DUAS XX27
–
Initial Report
CHIRP Comment
-
DUAS 0034
–
Initial Report
CHIRP Comment
-
DUAS XX29
–
Initial Report
CHIRP Comment
-
DUAS XX28
–
Initial Report
CHIRP Comment
The Board had the following comments
- For those that are interested, it is worthwhile clicking on the link below to look at the CSV files and Flight Log that Highways England circulated and which is pasted below.
- Focussing on the HF aspects of this flight, maintaining VLOS is critical to flight safety. The detailed flight logs seem to suggest that the aircraft hit something in the air after the Return to Home button had been pressed. The further away the Drone was from the pilot the more difficult it would have been to determine whether it was going to clear the cable in between the pylons, as the Drone climbed to its RTH altitude. Perspective is increasingly difficult to judge, the further away an object is.
- If you are planning a mapping mission that goes anywhere near powerlines, one of the pre-flight checks that should be undertaken is to measure the exact height of the powerlines above your take-off point and ensure your flight stays well clear of them. It is worth noting that if the ground where the pylons have been installed is flat, the powerlines themselves will still tend to dip in the middle!
- With regulatory approvals for flights within an Atypical Air Environment beginning, this occurrence highlights the need to carefully assess the ground risk associated with the infrastructure that is being overflown.
- The potential for loose wires swinging in the wind at altitude, was a particular example highlighted by an operationally experienced Board member.
DJI Flight Log Viewer – PhantomHelp.com