Confidential Human Factors
Incident Reporting Programme

The Charity
Aviation
Maritime

The Charity
Aviation
Maritime
DUAS 00XX

Initial Report
Serious Incident
Aircraft Type and Registration: Velos V3
No & Type of Engines: 2 Velos Rotors 6145N2 Brushless Motors
Year of Manufacture: 2024 (Serial no: GBR-OP-C2Q99JT6BCAX)
Date & Time (UTC): 17 March 2025 at 1709 hrs
Location: Onllwyn, Neath Port Talbot
Type of Flight: Training
Persons on Board: Crew – None Passengers – None
Injuries: Crew – None Passengers – N/A
Nature of Damage: Aircraft destroyed due to post-impact fire
Commander’s Licence: Other
Commander’s Age: 44 years
Commander’s Flying Experience: 149 hours (of which 40 were on type)
Last 90 days – 24 hours Last 28 days – 23 hours
Information Source: Aircraft Accident Report Form submitted by the pilot and further enquiries
Synopsis
During a first flight after fitting an ADS-B Mode S transponder, the UA experienced a series of erroneous flight channel inputs and fell to the ground. It is likely that an ADS-B transponder fitted to the UA contributed to a level of interference. The Civil Aviation Authority’s Operational Authorisation process did not fully assess the usage of the transponder in this instance. The operator has changed the configuration of the UAS for future flights with a lower-power Electronic Conspicuity (EC) device, and the regulator is in the process of updating their Operational Authorisation (OA) and UAS risk assessment for operations in the Specific Category regarding use of EC devices.
History of the flight
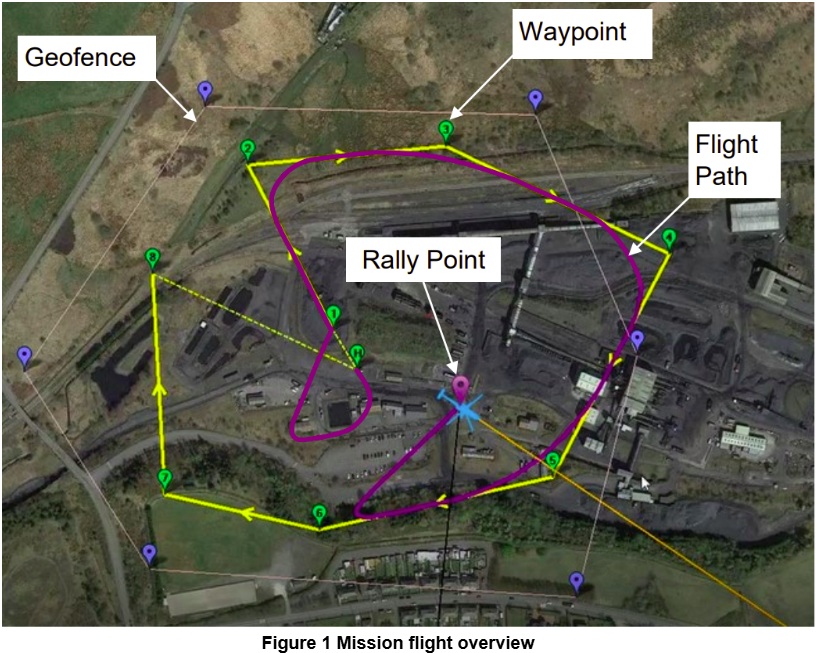
The mission for the flight was planned with eight waypoints, overlaid with a geofence that intersected between waypoints 4 and 5. The aim of the mission was to test the UA’s response to breaching the geofence and was the first flight with a new ADS-B Mode S transponder fitted. The UA took off and flew to waypoints 1 and 2. Between waypoints 2 and 3, there were two radio failsafe errors, which cleared automatically, and the flight continued. The UA proceeded to waypoints 3, 4 and 5, breaching the geofence (Figure 1).
Shortly before reaching waypoint 6, another Radio Failsafe error was displayed and cleared. The flight mode changed to RTL [Return to Land] and the UA headed towards the pre-programmed ‘Rally Point’.
When at the Rally Point, the UA entered a planned landing sequence. This was acknowledged by the pilot, who changed the flight mode to auto, in order to resume flying via the remaining waypoints. Following this in quick succession, there was an uncommanded flight mode change to alt hold, and the following errors displayed on the Control Unit (CU): mode change to auto failed, runup not complete, potential thrust loss (1) and error velocity variance. There was a further uncommanded flight mode change to auto and the aircraft dropped to the ground. A subsequent battery fire destroyed the aircraft.
Aircraft information
The Velos V3 is rotorcraft-style twin-motor UAS with a three-bladed rotor head. It has a maximum control range of up to 50 km and a maximum weight of 25 kg. The primary command and control (C2) link between the UA and the CU is via a 2.3 GHz Internet Protocol (IP) mesh radio network, with a secondary cellular C2 link. Connectivity between the controller and the aircraft is via 868 MHz radio modem. The aircraft was fitted with a 1090 MHz Mode S ADS-B transponder, with a nominal transmission power of 250 W. The transponder was installed in preparation for trialling future Beyond Line of Visual Sight with Visual Mitigation (BVLOS (VM)) operations in airspace where electronic conspicuity was required
Regulatory information
Electronic Conspicuity Until March 2025, 1090 MHz was the single frequency approved for airborne EC devices in the UK and was the standard used to specify equipment for this UAS. 978 MHz has since been made available specifically for UAS EC applications, but regulation and guidance is not yet available. Existing CAA guidance for EC devices is primarily contained within CAP1391 applicable to UK Annex II aircraft, [including Supplementary Amendment 2025-02 dated 28 Nov 2025] non-complex European Union Aviation Safety Agency (EASA) aircraft of <5,700 kg MTOM, gliders and balloons within uncontrolled UK airspace.
Following assessment, the transponder type information and operational conditions are detailed in Section 4.14 of the OA before the OA is approved and issued. The UAS accident flight was being operated within the CAA’s Specific Category, VLOS operations. The operator held a CAA OA for Beyond Visual Line of Sight with Visual Mitigations (BVLOS VM). The transponder technical details were contained within the operator’s Operating Safety Case documentation, referenced to from Section 2.4 of the OA, but transponder type information and operating limitations were not included within Section 4.14.
Tests and research
Prior to flight
On the day of the accident flight the transponder was not transmitting as expected, and further troubleshooting and configuration was completed prior to a series of system tests under VLOS. These tests highlighted connectivity issues with the primary and secondary C2 links and an on-board video camera. Adjustments by the operator included replacing a broken primary C2 link antenna boom, removing the SIM cards from the secondary C2 link system, moving the transponder position, and identifying and turning off nearby network repeaters that had been identified mounted on a building. The combination of these actions appeared to resolve the issues.
Post-accident
The manufacturer of the UA tested the aircraft’s response and values of the data channels if the radio modem experienced an interruption to transmission. This was achieved by, in turn, removing connection to the radio modem at the CU via power-off, and then to the aircraft via physical disconnection. The results showed the system held the last known values for all channels until connection was restored.
Analysis
Multiple data channels between the CU and the aircraft were affected at the same time, which exceeded the normal control parameters commanded by the CU. This resulted in the aircraft being unable to sustain flight. Testing showed that if a loss of connectivity between the radio modem and the flight computer occurred, the last known values would have been held until connectivity was restored. As changes of input value occurred, and the effects were not consistent across all channels, it is likely that the aircraft’s systems experienced a level of interference rather than a full loss of connectivity. The aircraft had not suffered from system communication issues prior to the installation and use of the transponder. In the absence of being able to test the aircraft post-accident, it is likely that this was the source of interference.
The operator’s choice of transponder was limited to those available for use on 1090 MHz frequency to satisfy a requirement for a particular location of airspace, and that would effectively integrate with the UA’s system architecture. The transponder’s specifications including transmission output power were more suited to higher-altitude and higher-speed operations. The fitting and use of a transponder was detailed within the operator’s Operating Safety Case documentation referenced within the OA, but the technical details and operating conditions had not been included in Section 4.14. This indicates that the transponder assessment had not be carried out by the regulator prior to OA approval, missing the opportunity to review the suitability of the transponder for the application, particularly its transmission power. The operator has taken the following actions for future flight operations:
- The remaining aircraft to be used in the trial will be re-fitted with a different transponder at 20 W output, capable of using either using the 978 or 1090 MHz bands.
- The command-and-control link hardware has been changed to provide a transponder/communications combination with proven capability tested by the equipment manufacturer. Prior to updated regulation and guidance becoming available for use of EC devices on 978 MHz, which is intended to be the standard for UAS, the regulator will continue to advise individual users of EC devices on UAS on a case-by-case basis. Use of 978 MHz is used for EC elsewhere in the world, and its adoption in the UK will increase choice of EC equipment available to operators.
The regulator is undertaking the following actions:
- Using UK Specific Operations Risk Assessment (UK SORA) framework for Specific Category operations, which has a separate Section for EC devices that will assist in providing an additional check point for transponder assessment.
- Updated wording will be incorporated into Section 4.14 of the OA template for 978 MHz devices, including technical compliance specifications.
Conclusion
The UA was subject to interference, which resulted in erroneous inputs to multiple system channels. This left the aircraft unable to sustain flight. It is likely that the interference originated from the UA’s transponder, although the source could not be definitively identified. The Operator’s OA was issued without an assessment of the transponder, missing the opportunity to identify that the transponder’s technical specifications exceeded that required prior to flight.