Confidential Human Factors
Incident Reporting Programme

The Charity
Aviation
Maritime

The Charity
Aviation
Maritime
DUAS xx21

Initial Report
AAIB Report 29335 published October 2024. Whilst being operated in a manual flight mode, the unmanned aircraft breached the geofence and changed to an automated flight mode. In response, the remote pilot reduced the throttle and changed back to the manual mode. Control of the aircraft was lost because the mode was changed at a low throttle setting and the subsequent actions to regain control were unsuccessful. The aircraft struck the ground and was destroyed.
The operator no longer uses the manual mode and has promoted the use of standardised phraseology between the ground control station operator and the remote pilot. Further action has been taken to consider and apply a suitably sized geofence for each operational flight.
The Operation Safety Case on which the Civil Aviation Authority (CAA) granted a Specific Category Operational Authorisation was missing definitions and procedures for the use of geofences and actions to be taken in the event of a breach. A Safety Recommendation has been made to the CAA as these omissions have further effect, as the use of a geofence is widely used as a mitigation for several other operational risks.
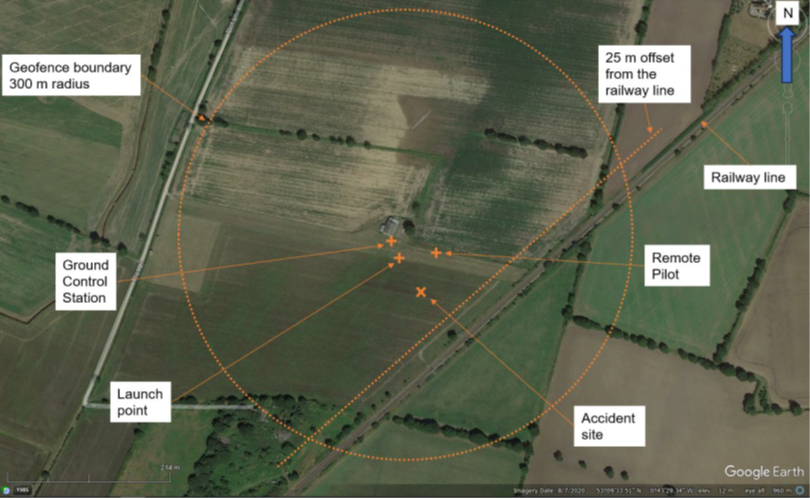
The Remote Pilot (RP) was undertaking a skills currency flight using a Malloy Aeronautics T150 unmanned aircraft and was assisted by a Ground Control Station (GCS) operator. The RP and GCS operator were in two-way communication via radio. The RP was flying circuits in Stabilised flight mode (stab mode) at a training ground. It is a remote site on farmland used by the organisation he was contracted to fly with, as an R&D and training pilot. The geofence for the flight was 40m high by 300m radius with the centre on the take-off point (see picture). The dimensions of the geofence were not considered by the RP and GCS operator prior to the flight but accepted as a standard training envelope.
The GCS operator noticed the aircraft was approaching the upper limit of the flight geography zone within the geofence and he informed the RP using terminology not immediately understood by the RP. The RP was aware that the aircraft was turning to the right and climbing quicker than he had expected. Shortly afterwards the aircraft breached the upper limit of the geofence and reverted to an automated Return to Launch (RTL) flight mode. The RTL automation initially commanded the aircraft to climb, which the RP instinctively counteracted by reducing the throttle. The GCS operator informed him that RTL mode was engaged, and the RP changed the flight mode, by cycling the three-way flight mode selector switch on the handheld transmitter, to loiter and then back to stab mode.
The aircraft diverged from level flight and was seen to follow an erratic flight path unfamiliar to the RP, during which it achieved a maximum pitch of -41° and -60.9° of roll. To regain control the RP increased the throttle to 100%, which caused the aircraft to overcorrect, and it then pitched to 85.3° with 60° of roll before descending rapidly from a height of 37 m. The RP realised he could not regain control and switched to an automated mode (loiter mode) but by this time the aircraft was heading towards the RP’s ground position, and he decided to close the throttle, bringing it to the ground. Twelve seconds had passed from the geofence breach before the aircraft struck the ground approximately 50m from the RP’s position and within the horizontal boundary of the geofence.
