An independent and confidential
reporting system for the Aviation industry

Rules and regs
Contents
- Editorial
- DUASxx10 - Probable Battery Disconnection
- DUASxx11 - Rapid Loss of Power
- DUAS22 - Loss of C2 link
- DUAS23 - Low Temperature Power Loss
- DUASxx13 - Obstacle Collision
- DUASxx14 - Loss of Visual Contact (BMFA)

Rupert Dent
RPAS Programme Manager
How do we ensure operators stay interested and motivated enough to remain abreast of changing rules?
Welcome to Drone FEEDBACK Edition 8.
Summer is underway. New regulations from CAP 722 Edition 9.1 along with Acceptable Means of Compliance / Guidance Material issued on 7th December are becoming bedded down in the Drone world. All applications for initial and renewal of Operational Authorisations are now being made under the new regulations.
What does this have to do with Human Factors I hear you say. Well, out and about talking to Drone users, I for one have had conversations with Drone pilots, who have made it clear to me that the regulations are becoming so complicated that they have an increasing tendency to just ignore them, not bother with either Flyer or OA renewals, but just carry on with occasional use of their legacy Drone, when they have small tasks to perform.
As technology evolves and Drones become more and more capable, the regulations must accommodate their additional capabilities, to maintain or indeed improve on the levels of safety. How do we deal with the Human Factors associated with ensuring the Drone community stays interested and motivated enough, to remain abreast of the rules? We cannot rely on the police alone to find transgressors.
Ideas on a postcard from wherever your holiday has taken you? Or alternatively respond to the recent CAA Call for Input: Review of UAS Regulations using the following link: Call for Input: Review of UK UAS Regulations – Civil Aviation Authority – Citizen Space (caa.co.uk)
CHIRP provides a vital safety net as another route to promote change when the normal channels of reporting aren’t delivering results, you don’t feel able to report through formal Occurrence Reporting systems, and for collecting reports with safety concerns that did not meet the threshold for normal reporting and would otherwise have gone unwritten. We rely on you to report Human Factors aviation-related safety concerns to us so that we can both help in their resolution and highlight relevant issues to others. Reporting is easy by using either our website portal or our App (scan the appropriate QR code shown or search for ‘CHIRP Aviation’ – avoiding the birdsong apps that come up!). In our reporting portal you’ll be presented with a series of fields to complete, of which you fill in as much as you feel is relevant – not every field is mandatory, but the more information you can give us the better. Although you’ll need to enter your email address to get access to the portal, none of your details are shared outside CHIRP, and we have our own independent secure database and IT systems to ensure confidentiality.
![]()



Reports
DUASxx10 - Probable Battery Disconnection
Initial Report
The UAS was being used in an police operation over an abandoned building near a public car park and train station. During hover over the building, the aircraft’s motors stopped and the aircraft fell vertically with no prior warning to the remote pilot. The aircraft struck the roof of the building and the battery separated.
Recorded data indicated that the battery probably disconnected in flight. This could have been caused by the battery not having been fully latched prior to take-off, or the latching mechanism or battery being worn from repeated use, resulting in an in-flight disconnection. The operator has taken safety action to remind their pilots of the importance of pre-flight checks and checking airframe and battery condition at their base.
The recorded data indicates that the most likely cause was a loss of battery power to the aircraft which instantly cut off the motors and the link to the controller. The battery state of charge was 77% at the time and there had been no warnings related to the battery. Both the operator and the aircraft manufacturer concluded that the most likely cause was the battery becoming disconnected. The damage to the battery was consistent with it having separated when the aircraft struck the roof of the building, and this detachment was more likely if it was already loose.The operator believed that the pre-flight checks were probably rushed and that the body worn camera image showed the battery not fully engaged (see photo). The aircraft manufacturer could not confirm whether it was fully engaged, but it is possible that it was not. It is also possible that the battery was engaged at that time, but that the latching mechanism or battery were slightly worn from use which led to an in-flight disconnection. There was no indication that the battery was swollen or had exceeded the temperature limit. There are no sensors on the battery locking mechanism to detect and warn the pilot that a battery is not fully latched. For this type of UAS it is important that it is flown in a manner to reduce the risk to uninvolved third parties if it were to fall vertically, and in this case the aircraft was being flown over a large, abandoned building which reduced that risk.

The operator has shared the learning from this accident with all its UAS pilots and reminded them of their responsibility to turn on their body worn camera before they carry out the UAS pre-flight checks so that the checks are captured, and of their responsibility to take time on the UAS checks that are completed at a local air base to ensure the aircraft is fit for use. They also planned to reinforce the briefing of observers, and to carry out routine checks of the batteries.
CHIRP Comment
You may remember that in Drone/UAS FEEDBACK Edition 7 batteries disconnecting in flight on this type of Drone was something of a theme. Well, in the interim this and the following AAIB report cover what seems to have been the same subject. So, we thought we would emphasise the topic again in this issue. We note that in this occurrence the pilot only had one hour of flight time in the last 90 days and a total of 7 hours of experience. CHIRP’s view is that operators should maintain their currency with a minimum of 2 hours in 90 days. Ensuring the battery is locked into place is something that comes from practice, particularly if it is as part of a rapid despatch requirement that the emergency services are often required to perform. Another idea if it isn’t already there in the pre-flight checks, is that the pilot runs a finger over the join between the battery and the airframe just after it has been fitted. If the battery is not flush with airframe, any gap will be felt immediately, even if it is more difficult to ascertain visually.
DUASxx11 - Rapid Loss of Power
Initial Report
During an aerial survey flight, the UAS detected a rapid loss of battery power and initiated an immediate automatic landing. Whilst descending, its flight behaviour became erratic, control was lost to the remote pilot, and the UA struck an uninvolved person before hitting the ground. The photograph shows the UA after falling to the ground.
It was not possible to determine a cause for the loss of battery power or the flight behaviour. There may have been an opportunity during flight control checks to consider unexpected battery discharge rate as a reason to abort the flight.
The flight was planned in accordance with applicable regulation and guidance for safe distances between the UA and uninvolved people and structures. Due to the erratic flight behaviour of the UA during its automatic landing, coupled with loss of flight control, the UA subsequently breached the required safe distances and then struck the construction worker. The battery was fully charged prior to the flight, was within the manufacturer’s recommended number of cycles, and no defects were found to have affected its chargeDuring flight, the battery percentage detected by the UAS dropped at an unexpectedly high rate that resulted in an automatic landing without notifying the pilot at the pre-set charge thresholds. The first indication of an abnormal battery discharge rate was during flight control checks. The pilot chose to continue with the planned flight as it would have been achievable using the indicated 88% battery level. Subsequently, the UAS continued to detect a high discharge rate which triggered the automatic landing. After the flight the battery integral charge level indicator showed 50-75% charge. It was not possible to determine the difference between this charge level and the battery power displayed on the handheld controller during the flight. Flight log data did not explain the discrepancy in battery level.

The UAS measured a high loss of battery power in a short space of time, leading to an uncontrolled landing where the distance between the UA and uninvolved people and structures was compromised. This sequence of events resulted in the UA striking an uninvolved person. It was not possible to determine a cause of the UA’s detecting a loss of battery power or its flight behaviour. Whilst the displayed level of power remaining was sufficient for the planned flight, there may have been an opportunity during flight control checks for the pilot to consider the abnormal battery discharge rate was likely to continue, and to abort the flight.
CHIRP Comment
Warnings during pre-flight control checks should always be heeded. Not everything is explained in the user manual of these type of aircraft, so a warning that comes up on the controller, which is then countered by other indications, deserves a landing followed by careful consideration. The software sometimes includes in-built triggers that are not fully explained, perhaps because they were part of an update instigated after the manual was published.
Operators are now being encouraged by the Regulator to use any of the publicly available Apps that track a Drone’s maintenance status. This includes the status of the battery and is granular enough to track performance of each battery cell. We highly recommend all pilots pre-flight check the performance of their aircraft’s batteries on previous flights as a way of detecting any potential weakness in battery performance that may impact their planned flight. It is human nature to forge on if the pilot is under time pressure and thinks they can achieve the task with a reasonable margin of “fuel”. It is easy under such circumstances to ignore a warning indication, but it is a mistake to do so!
DUAS22 - Loss of C2 link
Initial Report
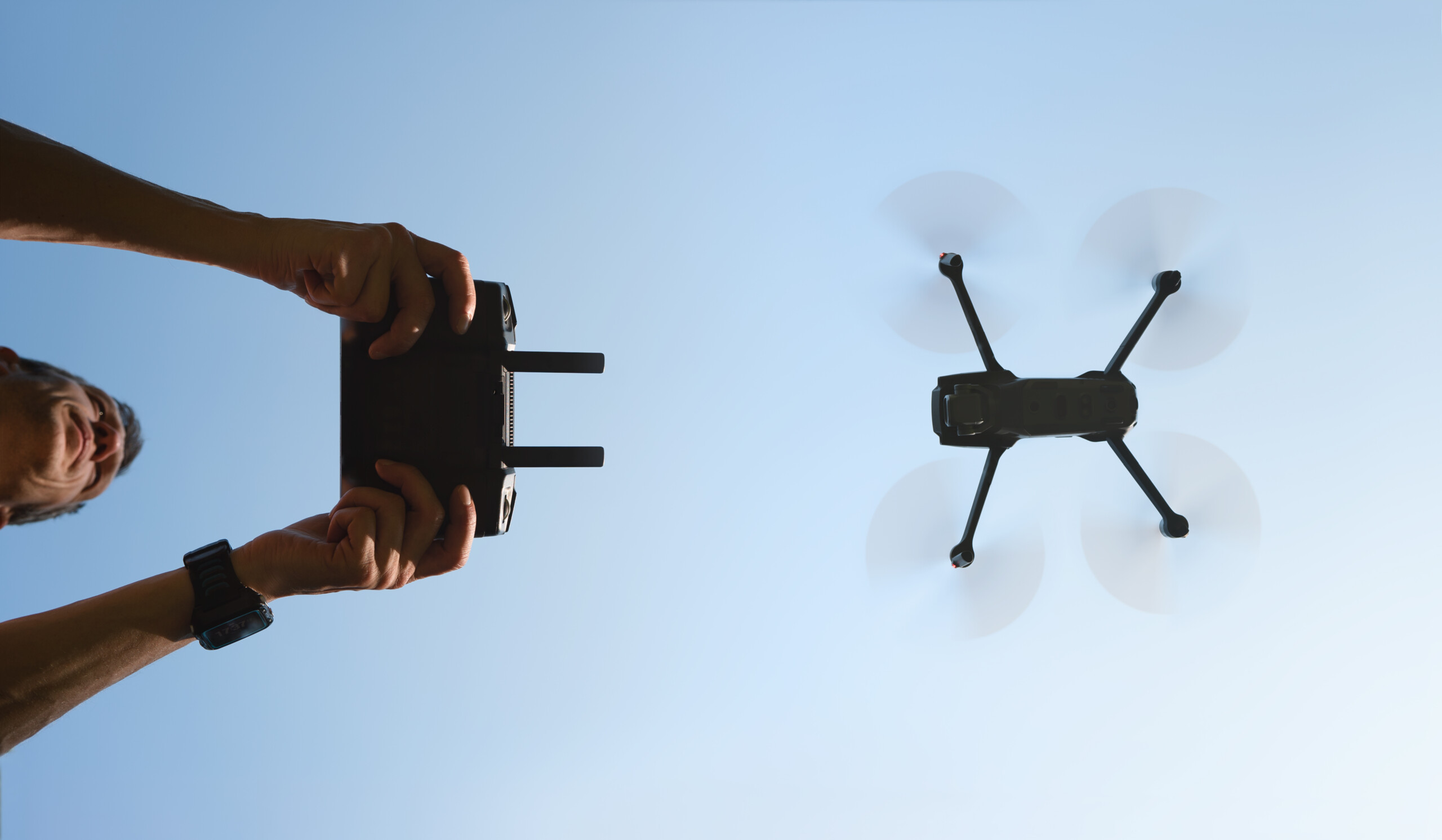
The flight crew were contracted to provide drone footage for a TV drama production. They had both worked with the production company on previous series of the drama since 2017, and with the producer since 2021. On the day of the incident the flight location was an exposed headland with cliffs, with the task to provide “top down” views of the cliff scenery to be used for VXF (visual effects), then later on in the day to film an actor jumping onto a green screen. The flight crew (remote pilot and camera operator / observer) normally fly a DJI Inspire 2 UAS with this production, however the wind speed was above the Inspire 2’s rated wind resistance of 10m/s, so the Mavic 3 Cine was chosen for the task (it is also far more stable for top-down shots than the Inspire 2).
It is normal procedure for the camera operator to connect the remote controller (RC) to an external monitor for the production crew to view during the flight. The Mavic 3 Cine does not allow a separate camera operator, but the DJI RC Pro does have an HDMI port to output to an external monitor. The RP had used this setup before (the last time was November 2022), however on the day of the incident the HDMI connection did not appear to work. The DJI RC Pro has a mini HDMI socket and the flight crew only had a single cable of this type so could not try a different cable (this was the same cable used in November and had not been used since). The flight crew discussed the problem and thought it may be due to a firmware update. Searching the web there were other similar instances, and answers pointed to an HDMI setting on the device, however this did not work.
It had now taken almost half an hour trying to diagnose the problem and the producer was wanting the drone in the air as soon as possible because the other part of the shoot was ready and the actors on their way to the set. The RP explained the problem and the producer was happy to look over the RP’s shoulder at the RC Pro screen. The UAS was prepared for the task and the normal checks completed, however the RP failed to check the action on loss of C2 link. The UAS was recently flown from a boat so the loss of C2 action was set to hover instead of return to home (RTH).
With the Inspire 2, the production crew would be looking at the monitor and discussing the shots with the camera operator, who would also give instructions to the RP to position the UA. The RP would keep the UA in VLOS at all times, and report back to the camera operator if a particular manoeuvre was not possible or would impact VLOS. On this flight the RP was having to look at the screen and discuss the shot with the producer whilst the camera operator – now acting as a trained UA observer – kept VLOS with the UA reporting back to the RP. The producer requested the RP to lower the UA height at an ideal spot for the shot. As the UA descended it went behind a higher section of the cliff, and the camera operator immediately reported to the RP that he had lost VLOS. In the same instant the C2 link dropped, and the RP was unable to regain control the UA.
The RP reported that the UA would initiate RTH after a few seconds then he could resume control, however the UA did not appear to rise up above the cliff. It was at this point the RP realised he had not checked the C2-loss action, and it was likely set to hover from the work off a boat. The RP and observer started walking towards the UA location, although the terrain was very steep and difficult. By the time the RP was about 50m from the UA’s location the low battery failsafe RTH commenced and the C2 link restored as soon as the UA ascended above the cliff. He landed the UA and returned to the production area, there was no damage to the UA and on landing the battery was at 17% remaining charge.
Given the remote location and proximity to the cliffs there was no danger to uninvolved people or other aircraft during the time the UA was hovering. The remainder of the day’s flights were executed without any issues.
Lessons learned: The RP was under pressure and failed to check the loss of C2 action, even though it is listed as a check item in the FRCs. The company daily risk assessment document will be updated to ensure all checks are completed prior to flight.
CHIRP Comment
At the end of the day, a commercial pilot needs to be able to resist outside pressures and stick rigorously to the established protocol. In the world of filming, which sometimes requires a large number of actors and extras being on site, there can be more pressure than in other industries. Report Number 3 in our Drone/UAS FEEDBACK Edition 7 dealt with a similar accident involving filming at Henley Royal Regatta, where pressure to film had been one factor in what may have been the cause of what subsequently happened.
A second observation is that when thinking about Visual Line of Sight, it is important not to forget Radio Line of Sight. Nowadays many of the available Drones have a ‘Return to Home’ (RTH) function that is triggered if there is a loss of the C2 link. As part of any recurrent training that a pilot does, we recommend that it includes triggering RTH and then cancelling and re-establishing control in order to experience and manage how it actually works.
Our third observation is a simple one that the reporter mentions. Don’t forget to set the RTH loss of C2 link action as part of your pre-flight checks! ‘Hover’ is good for some situations, but ‘RTH’ is good for others. It is better on the nerves not to rely on the low battery ‘RTH’ setting, if C2 link loss is set to ‘Hover’.
The fourth point is that in the current lexicon of the RPAS ecosystem, the Observer is called an “Airspace Observer”, which is to say their job is to look out for other air threats. Fundamentally it is up to the pilot to determine whether the aircraft is flying within Visual Line of Sight or not. In this instance there seems to have been a re-configuration of responsibilities which might have been unclear.
Finally, we wonder how clear of uninvolved persons the rocks or beach below might have been. It isn’t mentioned in the report, but being certain there was nobody underneath would have reduced the stress of the situation.
DUAS23 - Low Temperature Power Loss
Initial Report
Due to low temperature (-3c) battery simply stopped operating and the drone fell. In subsequent correspondence, the reporter added that the drone was a DJI phantom 4 pro. A great bit of kit, well supported by DJI with software and updates. Yes, indeed it was -3, with several inches of snow.
When I couldn’t find the drone after it disappeared, I hooked my base unit up to my PC at home, and yes, it had recorded the entire flight, and I was able to locate it in daylight hours, the following day. I sent it off for repair and paid about around £200 for gimbal damage.
The drone was 2 years old when it had the event in the snow. Hours-wise and battery-wise, it had flown about 40 hours. From memory I think the batteries had been recharged around 30 times. The aircraft had all auto functions switched on and despite having flown quite a few trips over some of our local lochs, there was never any indication of issues caused by faulty inputs.
Sadly, I no longer have the drone as I experienced a detachment of a rotor blade during a subsequent flight, and although I located it using the DJI app, it was in such a heavily forested area, I lost it altogether. I have more than 15,000 hours flying all sorts of aircraft in all sorts of situations, military ops, difficult terrain etc, and I am more careful than needed. I also teach human factors, so feel I could recognise such, should they appear. I don’t think they affected the operation.
Bottom line, imho, (in my honest opinion) low oat, battery performance, sudden death of the battery. Don’t fly in cold weather. Software located drone (it was white against a background of 1 foot of snow)
CHIRP Comment
This report involves another battery related problem. The reporter, an experienced crewed aviation pilot, felt that the battery stopped functioning because of the temperature and for no other reason. The manufacturer specification states that the aircraft involved (and in fact its controller too) has an operating temperature range of 00 C to 400 C. So, the pilot may indeed be correct. But regarding their assertion that there was no Human Factors involved, on the basis of the evidence we have seen, we feel there may indeed have been an element of Human Factors. The reason is that operating it at -30 C is outside its operating limits set out in the User Manual. As a pre-flight check item, it is worth including the operating temperature limits as part of a quick reference guide kept close by for the pilot to look at.
There are a couple of other points to note:
-
- If there was snow on the ground, humidity might have been high, which may have lead to icing conditions. Could this have been the cause of it falling to the ground?
- Some Drones (including the one referred to in this report) have bottom facing sonar and radar Vision Systems. We wonder if at the moment of take off, the aircraft had come into contact with the snow which might have confused the Vision System. The Users Manual refers to avoiding flight over uniform colours or surface areas including snow, because it confuses the Vision System.
- Our experience is that IMUs can fail in cold weather. When it happens, the effect is that the Drone can fly straight into the ground because it thinks it is horizontal but it is in fact flying at an angle.
Readers thoughts on this are more than welcome.
DUASxx13 - Obstacle Collision
Initial Report
Following their GVC (General Visual Line of Sight Certificate) training, a newly qualified Remote Pilot (RP) experienced a minor accident whilst conducting the 6 hours of non-operational mandatory flight training that precedes the [XXXXX] flight assessment. On Sunday 7th May, the pilot was flying a DJI M30T in a field >50m away from a railway. The flight was taking place at night, which appears to have been a contributing factor in the accident.
The RP was practicing a rapid descent deconfliction manoeuvre using a DJI M30T, and had rapidly descended the aircraft from an altitude of approximately 80m to 3m. The RP simultaneously reduced the lateral distance of the aircraft from approximately 390m to 3m. At the end of the descent manoeuvre, the RP accidentally pushed forward on the right control stick, instead of the left (throttle) and the aircraft collided with a nearby palisade fence. The aircraft experienced minor damage, albeit adequate to necessitate repair by an external service provider.
Whilst it is generally considered positive that the RP was practicing an avoiding manoeuvre in a rural location, the RP descended the drone at excessive speed, leading to confusion regarding the control stick inputs. The RP pushed his flying skills too far, too fast during training and should have avoided such actions during a night flight.
The RP was undertaking a training flight at night – for this reason, the lighting conditions were insufficient for the obstacle avoidance sensors to function and, as a failsafe, avert the collision. The RP was also alone during the training flight – whilst this is permitted, it is advised that training flights should be conducted with an experienced colleague where possible and available for support.
Operator’s internal recommendations:
-
- Only conduct simple flights at night and be aware that obstacle avoidance sensors will not work unless there is sufficient lighting.
- You are obligated to read your aircraft manuals and must understand how the aircraft will behave under different weather and lighting conditions.
- Night Operations require robust planning, risk assessments and mitigations to be in place.
- These include, but are not limited to, the use of TOAL lighting and minimising the flight distance. You are also required to observe, and risk assess the site during the day.
- It is important not to push your skills too far, too fast – particularly if you are a newly trained RP. It is advised that you should identify and contact a more experienced colleague to support you during training flights.
CHIRP Comment
Our initial observation here is that a trainee pilot accumulating currency on their own and at night, before reaching a target number of currency hours, may not be the ideal situation. We would suggest that learning in daylight first before flying at night is a lower risk strategy. The Operator seems to suggest the same, so we agree with their analysis.
The other point that occurs to us is that choosing a training area that is near a fence may not be the best choice. When training, the pilot can choose where they want to be, which is different to being at a location that is part-and-parcel of the object of the mission. Choose a training location that has the minimum number of hazards possible.
Practising an avoidance manoeuvre with the Matrice 30T is good. The only suggestion we have for when doing so, is that it may be wise for an inexperienced pilot to do so in F mode “Tripod” or slow speed mode first, and then after several exercises switching into P mode and then when familiarity has built up, doing so in N mode and then S mode.
DUASxx14 - Loss of Visual Contact (BMFA)
Initial Report
We are grateful to the BMFA that they have now established a system whereby we automatically receive incident reports as they are filed. The occurrence happened above 400ft (120m) and the unmanned aircraft flew beyond visual line of sight and was not found.
The Model was an EFlite Mystique RES glider, flying weight ~5lb, wingspan 2.9m. Conditions were clear blue sky with small patchy clouds, wind from NE around 8mph gusting 15mph? I had climbed to ~500 ft and was circling in what I believed was lift centred over the flying patch. My telemetry was reporting current height just over 700 ft when the glider suddenly became indistinct and then totally disappeared against what I had taken to be a clear blue sky. After a few seconds of panic, I activated the spoilers and held in rudder, but the model did not reappear.
The next height report (30 seconds after the 700+ ft) was 79ft but I did not see or hear anything impact nearby and was concerned that the model actually carried on climbing and that the 79ft was a false reading. If the model had lost 700ft in 30 seconds, I would have expected to hear wing flutter on this model and then the noise of an impact. I did not see the model again and the telemetry lost connection. About 30 minutes later on, I drove downwind along the road for ½ mile or so, but the model did not reconnect with the Tx, so I have no idea where it may have ended up.
CHIRP Comment
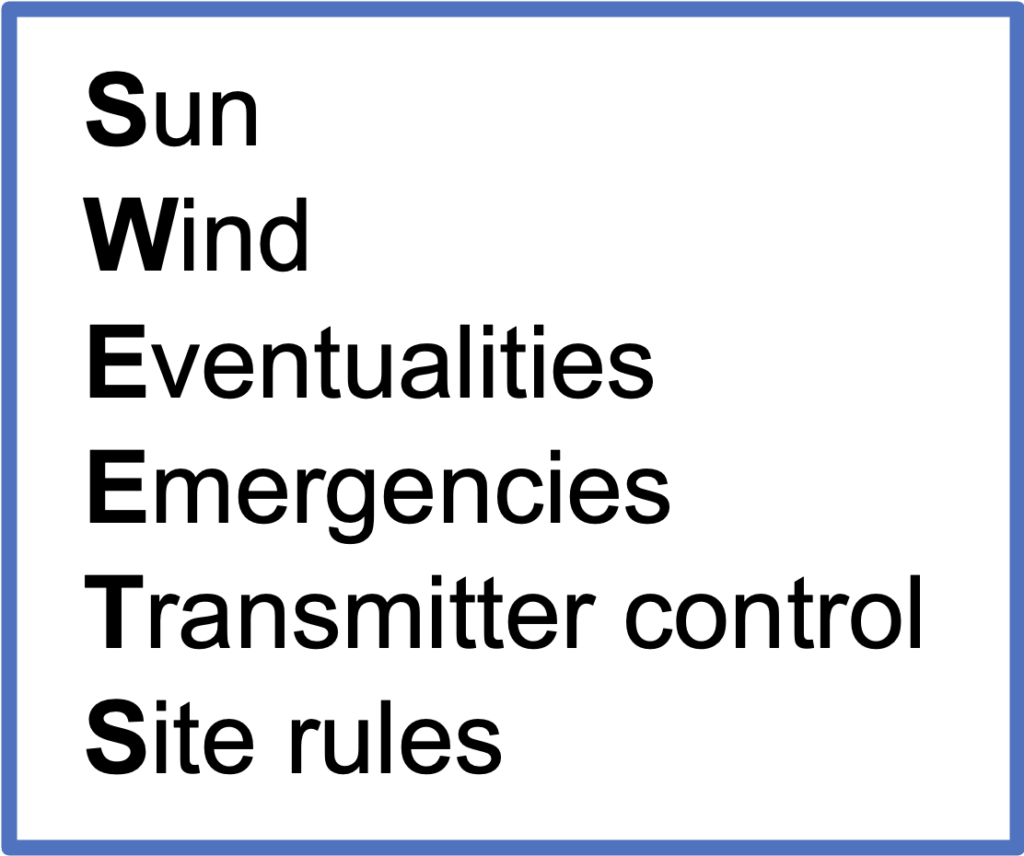
The consistency of reporting amongst modellers is excellent and almost certainly better than the Drone community. We do note a relatively high frequency of unintentional BVLOS flight that sometimes ends with the loss of the aircraft. An important point to note is that before you take off it is always useful to run through in your mind what actions you will take should you lose sight of your aircraft. The BMFA have recently updated guidance on this and suggest considering following the ‘SWEETS’ pre-flight checks that we think have relevance to drone operations and are worth considering.
When unintentional BVLOS happens to drone pilots, the fact that they often have controllers with screens and the aircraft mostly have cameras, FPV or otherwise, the occasions when the aircraft is recovered may be slightly higher.
Gliders are famously difficult to spot from a crewed aviation perspective largely because of their profile. Clearly this is also the case as far as models (and drones) are concerned. A blue sky with small patchy clouds is a difficult environment to fly in if the aircraft has a low profile and is as far away as 700ft. The orientation of its flight may be even more difficult if the aircraft is circling. We wonder whether a strobe would make any difference, or perhaps painting the aircraft in a more visible colour?