An independent and confidential
reporting system for the Aviation industry


Automated flight programmes need extra planning
Contents
- Editorial
- Comments from Readers on Previous Editions and Reports
- Report to CHIRP
- Acronyms
- ILAHFFT
- Reporters Guide
- Get 5% discount at Pooleys Flight Equipment through CHIRP
- DUAS 0039 - Pilot Error causes DJI Mini 5 to crash into fine tree branches
- DUAS 0040 - I forgot my Drone was in the Sky
- DUAS 0041 - Collision with Drone while cycling
- DUAS 00XX - AAIB Bulletin: 2/2026 Velos V3 AAIB-30745

Rupert Dent
RPAS Programme Manager
Welcome to Drone FEEDBACK Edition 16.
With the reports in this issue, there is an element of commonality regarding Human Factors associated with automated flight plans. Whether it is for photography, mapping or anything else, if the settings are not appropriate for the task, a successful outcome is being left to chance!
January 2026 brought some good news for Drone Operators, because Altitude Angel’s Guardian UTM has been bought by the Spanish company the Indra Group. However, what this means for the Drone Assist App remains unclear, but it does at least give some hope that it may continue to function in the future. Other Apps have been developed such as the Drone Map, DroneCloud, the NATS Drone website, the Aeronautical Information Publication for NOTAMs and Skydemon, all of which can be used to find helpful flight planning information.
In the last edition of FEEDBACK, we mentioned the topic of Pop Up TDAs for BVLOS State Flights and how they are currently being managed. We have had a reader’s comment on the subject, which is published below.
Rupert Dent
RPAS Programme Manager
Comments from Readers on Previous Editions and Reports
“I read your article on short-notice TDAs in CHIRP Drones/UAS 15 January 2026 with some incredulity and growing disbelief. It is a fact that crewed aircraft are allowed to fly without radio in many types of airspace, and even if they have a radio, outside of controlled airspace it is not a legal requirement that they be in contact with any particular ground station or on particular radio frequency in any particular area. That’s even the case when VFR at less than 140 knots in class E controlled airspace. They are also not required to carry any modern data devices which would update them of NOTAMs as they arise. It is therefore quite legal for them to be entirely unaware of any short-notice TDA that might spring up around an incident at any time, since it didn’t exist when they checked NOTAMs on the ground before departure. Given these facts, how is it supposed to be possible for crewed aircraft to know of the existence of such a TDA, or to know who they should speak to if they did know of its existence? Even more so since it’s entirely legal for them to fly without any means whatsoever of making such contact if they wanted to. Indeed, it’s even possible for such a short-notice TDA to appear AROUND an aircraft already in flight, whether they know of it or not. Creating such short-notice TDAs, which can be entirely legitimately infringed by unaware aircraft, would therefore seem tantamount to entrapment. As things stand, I can’t make any sense of this legal nonsensicality whichever way I look at this proposal. There would therefore, I believe, need to be either large changes to aviation law, impacting a large number of aircrew and requiring a considerable length of time to implement, or a workable, automatic mandatory aircraft-to-aircraft detection regime, again requiring a considerable implementation time, before any such proposal could go ahead. It is not enough for the CAA, in its wisdom or otherwise, to decide people can just throw up such TDAs left right and centre, without sufficient notice for crewed aircraft flying completely legally to be able to comply with what is effectively dynamically varying law, of which they have no way of being aware. To do otherwise seems to me to be entrapment, and I suggest it might therefore be quite unlikely to survive a legal challenge.”
We have submitted this comment to the CHIRP General Aviation team and it has been published in their version of FEEDBACK.
Report to CHIRP
Our reporting process is simple and quick using either our website portal or our App (scan the appropriate QR code shown or search for ‘CHIRP Aviation’ – avoiding the birdsong apps that come up!). In our reporting portal you’ll be presented with a series of fields to complete. Fill in as much as you feel is relevant – not every field is mandatory, but the more information you can give us the better. Although you’ll need to enter your email address to get access to the portal so that we can screen out bots etc, none of your details are shared outside CHIRP, and we have our own independent secure database and IT systems to ensure confidentiality. That way you can help to improve safety by sharing important lessons without worrying about possible consequences. Anything that could identify a reporter is removed from our reports before progressing or publishing them, and we liaise with the reporter in every step of the process. Each report plays its part in raising awareness of important safety issues and wider trends and provides lessons for all to learn from. Report-by-report we can make aviation safer – as our strapline says, “you report it, we help sort it.”

Acronyms
ILAHFFT

Reporters Guide
Get 5% discount at Pooleys Flight Equipment through CHIRP
Pooleys have kindly agreed to support CHIRP’s fund-raising activities by allocating us a discount code on their online shop. Enter the code ‘Chirp’ (case sensitive) at the appropriate point at the payment stage to get 5% discount and generate some commission for CHIRP. Sadly, this doesn’t apply to the purchase of Bose headsets, but everything else qualifies! If you do use Pooleys for your purchases, or know other people who do, please do share the code. The more the code is circulated, the more it is used and the greater the commission generated to help CHIRP build its resources to do more.
![]()
Reports
DUAS 0039 - Pilot Error causes DJI Mini 5 to crash into fine tree branches
Initial Report
Incident Description (Pilot Report)
- Location: Gorge at XXXXX, over the XXXX.
- Conditions: Calm weather, no high wind or rain. GPS signal was weak due to the steep-sided location.
- Flight Profile: Low-altitude aerial tracking along the river, navigating between overhanging tree branches.
What Happened
- While conducting the low-level pass, the drone entered an area with multiple fine overhanging branches.
- The pilot briefly focused on the screen to maintain positioning.
- Although most branches were avoided, one fine branch was not detected by the drone’s obstacle avoidance system.
- The drone became entangled in the branches above deep water.
- Due to the height, river conditions, and risk to safety, recovery was not possible. The aircraft was deemed unrecoverable and is considered a total loss.
Contributing Factors
- Weak GPS signal in the gorge.
- Fine branches not detected by obstacle avoidance sensors.
- Pilot over-reliance on obstacle avoidance capability in a high-risk environment.
- Low-altitude proximity to natural obstructions.
Safety Outcome
- No persons were present nearby.
- No property damage other than the aircraft.
- Aircraft written off in situ.

CHIRP Comment
The Board had the following comments:
- When flying in this sort of scenario, it is wise to have tested the Drone proximity detection capabilities beforehand. In doing so you will refresh your sense of the limitations of the aircraft’s obstacle avoidance capabilities.
- Although they have evolved substantially, proximity detection systems do have a limit, and very thin branches or wires with a grey background can catch pilots out. In the winter with no leaves on them, they are difficult enough to see with the naked eye. It will of course partly depend on the background.
- Depending on the type of Drone, the built-in systems do have an angle where there is a blind spot for detection. This also needs to be considered.
- If the level of light is low, the detection system will be even less effective at “seeing” thin branches.
- Visual Line of Sight (VLOS) should be treated as the primary method for deconfliction. Obstacle Avoidance sensors should serve as a backup method. We wonder whether framing the shot became too much of a focus of attention.
- There is no substitute for a pre-flight site assessment of the route to be flown before deciding to take off. In this instance it is not clear that an assessment was done, which if it had been may helped with depth and distance perception and avoiding branches.
DUAS 0040 - I forgot my Drone was in the Sky
Initial Report
I was flying my drone one night and forgot it was in the sky, so I turned off the controller. It crash landed into a parked car.
If anyone wants to know what happens when you switch off the controller and walk away from your drone, read on.
Did some fireworks last night and set the drone up to record the boxes I bought, so two deployments so to speak along with audio. First one went fine, I hovered it to the side of the house on record and switched off my audio, brought the drone back afterwards. Launched it to the same place for the second video, did both the box and our final firework. Turned off the audio and the controller and started chatting to my neighbour as I was putting some bits away. Whilst chatting to him I noticed what looked like someone else’s drone near to where mine had been, although this had a load of white lights in it and was coming downwards. I remember thinking how lucky it had been that it wasn’t there earlier, as we had both been flying in the same place!
As I was walking back in the house I suddenly thought where is the drone? Then it dawned on me, I had totally forgotten about it. Around 15 mins had passed since turning off my controller. Can’t believe I did it, but I am not using it really any more so not in the habit of thinking about it.
I used the bleep and flash to find it in the road outside, half on the kerb having what looks like clipped a car on the way down. I thought it would RTH, but it didn’t. Quick inspection and test, not a mark on it and flew like new.
I presume the white lights were my drone?
CHIRP Comment
The Board had the following comments:
- We are particularly grateful for this very open and honest report.
- It is important to recognise the limit of your capacity when flying a Drone. There is a point at which it becomes very difficult for anyone to remember all aspects of the multiple tasks they are trying to undertake simultaneously. Know your limits!
- We do not recommend lighting fireworks and flying a Drone at the same time. Keeping eyes on the Drone in the dark is a task in itself that needs concentration and maintaining Visual Line of Sight is a legal requirement.
- Whatever the size and weight of your Drone, it is important to stay current and not fall out of practice. Distraction from your surroundings is a constant threat. When mixed with a lack of currency on the aircraft, the consequences will multiply.
- Creating a marked off safe space for both take-off and landing of the Drone is essential. This might also have reminded the pilot that they had launched one in the first place.
- Turning off the controller should have resulted in RTH (Return to Home) being triggered. However, perhaps the reason it didn’t do this was because the reaction to the trigger event was set to hover. After hovering until it started to run out of battery and with the controller switched off, it may well have just done an autoland in situ, rather than an RTH.
- Turning the audible warnings off on any Drone Flight is increasing the chance of Human Factor errors creeping in.
- When flying a Drone, it is not advisable to be doing any other task, whether it is setting off fireworks or something else.
DUAS 0041 - Collision with Drone while cycling
Initial Report
Cycling on cycle/footpath, drone being flown by pedestrian, video recording his walk. I experienced a head on impact with the drone damaging my helmet but fortunately I was unhurt. Drone flown in ‘follow mode’ pilot/owner very apologetic. Had the impact been four inches lower, then facial injury would have been likely. So, a near miss report
CHIRP Comment
The Board had the following comments:
- This report highlights the risks associated with not understanding the “follow me” mode, a popular function often found on small photography Drones.
- Setting the altitude during pre-flight checks needs to be done based on a knowledge of the local terrain. It should always be set higher than anything in the surrounding area including people walking or bicycling.
- Because the operator had an accident that involved a collision with a person, albeit they were unhurt, it should have been reported to the AAIB. The report does not state whether this was done.
- If it was a DJI Drone with the Active Track function, it should have had the obstacle-sensing switched on. This would have meant the aircraft could have avoided coming into contact with the bicyclist’s helmet.
- We are unsure of the direction the drone was flying in, but if it was towards the cyclist, the collision avoidance system may not be able to react in time, given the closing speed between them.
- Active Track is very good for action shots, but it doesn’t mean that the pilot can forego developing a broad situational awareness of where they will be flying and who might enter the flight arena. When using Active Track, a pilot must always retain Visual Line of Sight. Many online videos that have been made using Active Track seem to show situations where the pilot is clearly not looking at the Drone.
DUAS 00XX - AAIB Bulletin: 2/2026 Velos V3 AAIB-30745
Initial Report
Serious Incident
Aircraft Type and Registration: Velos V3
No & Type of Engines: 2 Velos Rotors 6145N2 Brushless Motors
Year of Manufacture: 2024 (Serial no: GBR-OP-C2Q99JT6BCAX)
Date & Time (UTC): 17 March 2025 at 1709 hrs
Location: Onllwyn, Neath Port Talbot
Type of Flight: Training
Persons on Board: Crew – None Passengers – None
Injuries: Crew – None Passengers – N/A
Nature of Damage: Aircraft destroyed due to post-impact fire
Commander’s Licence: Other
Commander’s Age: 44 years
Commander’s Flying Experience: 149 hours (of which 40 were on type)
Last 90 days – 24 hours Last 28 days – 23 hours
Information Source: Aircraft Accident Report Form submitted by the pilot and further enquiries
Synopsis
During a first flight after fitting an ADS-B Mode S transponder, the UA experienced a series of erroneous flight channel inputs and fell to the ground. It is likely that an ADS-B transponder fitted to the UA contributed to a level of interference. The Civil Aviation Authority’s Operational Authorisation process did not fully assess the usage of the transponder in this instance. The operator has changed the configuration of the UAS for future flights with a lower-power Electronic Conspicuity (EC) device, and the regulator is in the process of updating their Operational Authorisation (OA) and UAS risk assessment for operations in the Specific Category regarding use of EC devices.
History of the flight
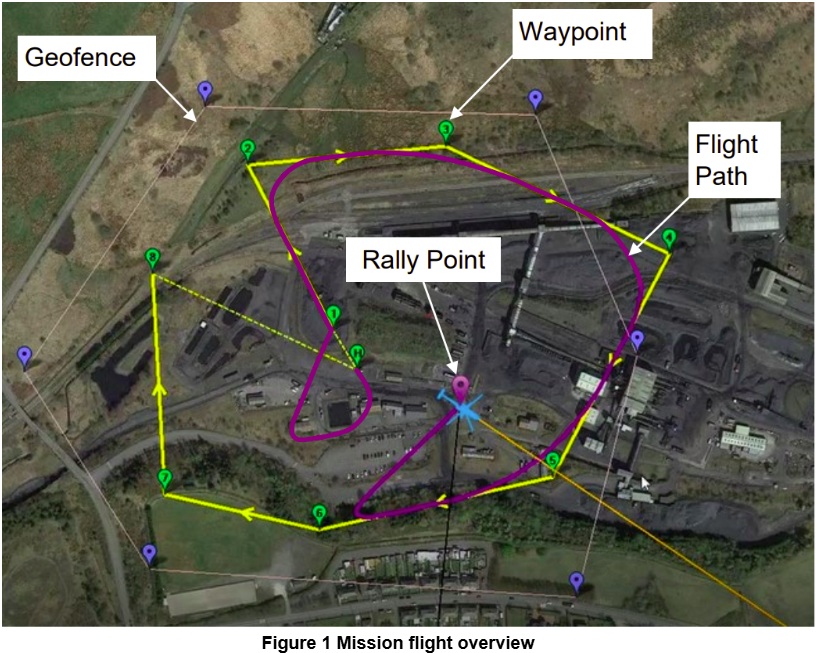
The mission for the flight was planned with eight waypoints, overlaid with a geofence that intersected between waypoints 4 and 5. The aim of the mission was to test the UA’s response to breaching the geofence and was the first flight with a new ADS-B Mode S transponder fitted. The UA took off and flew to waypoints 1 and 2. Between waypoints 2 and 3, there were two radio failsafe errors, which cleared automatically, and the flight continued. The UA proceeded to waypoints 3, 4 and 5, breaching the geofence (Figure 1).
Shortly before reaching waypoint 6, another Radio Failsafe error was displayed and cleared. The flight mode changed to RTL [Return to Land] and the UA headed towards the pre-programmed ‘Rally Point’.
When at the Rally Point, the UA entered a planned landing sequence. This was acknowledged by the pilot, who changed the flight mode to auto, in order to resume flying via the remaining waypoints. Following this in quick succession, there was an uncommanded flight mode change to alt hold, and the following errors displayed on the Control Unit (CU): mode change to auto failed, runup not complete, potential thrust loss (1) and error velocity variance. There was a further uncommanded flight mode change to auto and the aircraft dropped to the ground. A subsequent battery fire destroyed the aircraft.
Aircraft information
The Velos V3 is rotorcraft-style twin-motor UAS with a three-bladed rotor head. It has a maximum control range of up to 50 km and a maximum weight of 25 kg. The primary command and control (C2) link between the UA and the CU is via a 2.3 GHz Internet Protocol (IP) mesh radio network, with a secondary cellular C2 link. Connectivity between the controller and the aircraft is via 868 MHz radio modem. The aircraft was fitted with a 1090 MHz Mode S ADS-B transponder, with a nominal transmission power of 250 W. The transponder was installed in preparation for trialling future Beyond Line of Visual Sight with Visual Mitigation (BVLOS (VM)) operations in airspace where electronic conspicuity was required
Regulatory information
Electronic Conspicuity Until March 2025, 1090 MHz was the single frequency approved for airborne EC devices in the UK and was the standard used to specify equipment for this UAS. 978 MHz has since been made available specifically for UAS EC applications, but regulation and guidance is not yet available. Existing CAA guidance for EC devices is primarily contained within CAP1391 applicable to UK Annex II aircraft, [including Supplementary Amendment 2025-02 dated 28 Nov 2025] non-complex European Union Aviation Safety Agency (EASA) aircraft of <5,700 kg MTOM, gliders and balloons within uncontrolled UK airspace.
Following assessment, the transponder type information and operational conditions are detailed in Section 4.14 of the OA before the OA is approved and issued. The UAS accident flight was being operated within the CAA’s Specific Category, VLOS operations. The operator held a CAA OA for Beyond Visual Line of Sight with Visual Mitigations (BVLOS VM). The transponder technical details were contained within the operator’s Operating Safety Case documentation, referenced to from Section 2.4 of the OA, but transponder type information and operating limitations were not included within Section 4.14.
Tests and research
Prior to flight
On the day of the accident flight the transponder was not transmitting as expected, and further troubleshooting and configuration was completed prior to a series of system tests under VLOS. These tests highlighted connectivity issues with the primary and secondary C2 links and an on-board video camera. Adjustments by the operator included replacing a broken primary C2 link antenna boom, removing the SIM cards from the secondary C2 link system, moving the transponder position, and identifying and turning off nearby network repeaters that had been identified mounted on a building. The combination of these actions appeared to resolve the issues.
Post-accident
The manufacturer of the UA tested the aircraft’s response and values of the data channels if the radio modem experienced an interruption to transmission. This was achieved by, in turn, removing connection to the radio modem at the CU via power-off, and then to the aircraft via physical disconnection. The results showed the system held the last known values for all channels until connection was restored.
Analysis
Multiple data channels between the CU and the aircraft were affected at the same time, which exceeded the normal control parameters commanded by the CU. This resulted in the aircraft being unable to sustain flight. Testing showed that if a loss of connectivity between the radio modem and the flight computer occurred, the last known values would have been held until connectivity was restored. As changes of input value occurred, and the effects were not consistent across all channels, it is likely that the aircraft’s systems experienced a level of interference rather than a full loss of connectivity. The aircraft had not suffered from system communication issues prior to the installation and use of the transponder. In the absence of being able to test the aircraft post-accident, it is likely that this was the source of interference.
The operator’s choice of transponder was limited to those available for use on 1090 MHz frequency to satisfy a requirement for a particular location of airspace, and that would effectively integrate with the UA’s system architecture. The transponder’s specifications including transmission output power were more suited to higher-altitude and higher-speed operations. The fitting and use of a transponder was detailed within the operator’s Operating Safety Case documentation referenced within the OA, but the technical details and operating conditions had not been included in Section 4.14. This indicates that the transponder assessment had not be carried out by the regulator prior to OA approval, missing the opportunity to review the suitability of the transponder for the application, particularly its transmission power. The operator has taken the following actions for future flight operations:
- The remaining aircraft to be used in the trial will be re-fitted with a different transponder at 20 W output, capable of using either using the 978 or 1090 MHz bands.
- The command-and-control link hardware has been changed to provide a transponder/communications combination with proven capability tested by the equipment manufacturer. Prior to updated regulation and guidance becoming available for use of EC devices on 978 MHz, which is intended to be the standard for UAS, the regulator will continue to advise individual users of EC devices on UAS on a case-by-case basis. Use of 978 MHz is used for EC elsewhere in the world, and its adoption in the UK will increase choice of EC equipment available to operators.
The regulator is undertaking the following actions:
- Using UK Specific Operations Risk Assessment (UK SORA) framework for Specific Category operations, which has a separate Section for EC devices that will assist in providing an additional check point for transponder assessment.
- Updated wording will be incorporated into Section 4.14 of the OA template for 978 MHz devices, including technical compliance specifications.
Conclusion
The UA was subject to interference, which resulted in erroneous inputs to multiple system channels. This left the aircraft unable to sustain flight. It is likely that the interference originated from the UA’s transponder, although the source could not be definitively identified. The Operator’s OA was issued without an assessment of the transponder, missing the opportunity to identify that the transponder’s technical specifications exceeded that required prior to flight.
CHIRP Comment
The Board comments were as follows:
- The power output of the Mode S ADSB Transponder at 250W, exceeded what was required, by a large margin.
- It is not immediately clear how much off-site testing had been done prior to the accident flight. It would have been worthwhile doing more.
- The process of developing the regulations for new UAS technology is itself subject to Human Factor occurrences. On this occasion it seems that the regulator did not assess the transponder and its potential for ‘own-ship’ interference.
- This incident proves how important the testing of the Mode S equipment is, including testing it as part of an integrated item against all the functionality of the whole Uncrewed Aerial System, if it is to be approved.
- The EC debate has been widely held over an extended period and policy decisions to make it mandatory are now scheduled for 2026. The Board strongly recommends that this objective is adhered to.