

FEEDBACK
Rules and regs
How do we ensure operators stay interested and motivated enough to remain abreast of changing rules?
Welcome to Drone FEEDBACK Edition 8.
Summer is underway. New regulations from CAP 722 Edition 9.1 along with Acceptable Means of Compliance / Guidance Material issued on 7th December are becoming bedded down in the Drone world. All applications for initial and renewal of Operational Authorisations are now being made under the new regulations.
What does this have to do with Human Factors I hear you say. Well, out and about talking to Drone users, I for one have had conversations with Drone pilots, who have made it clear to me that the regulations are becoming so complicated that they have an increasing tendency to just ignore them, not bother with either Flyer or OA renewals, but just carry on with occasional use of their legacy Drone, when they have small tasks to perform.
As technology evolves and Drones become more and more capable, the regulations must accommodate their additional capabilities, to maintain or indeed improve on the levels of safety. How do we deal with the Human Factors associated with ensuring the Drone community stays interested and motivated enough, to remain abreast of the rules? We cannot rely on the police alone to find transgressors.
Ideas on a postcard from wherever your holiday has taken you? Or alternatively respond to the recent CAA Call for Input: Review of UAS Regulations using the following link: Call for Input: Review of UK UAS Regulations – Civil Aviation Authority – Citizen Space (caa.co.uk)
CHIRP provides a vital safety net as another route to promote change when the normal channels of reporting aren’t delivering results, you don’t feel able to report through formal Occurrence Reporting systems, and for collecting reports with safety concerns that did not meet the threshold for normal reporting and would otherwise have gone unwritten. We rely on you to report Human Factors aviation-related safety concerns to us so that we can both help in their resolution and highlight relevant issues to others. Reporting is easy by using either our website portal or our App (scan the appropriate QR code shown or search for ‘CHIRP Aviation’ – avoiding the birdsong apps that come up!). In our reporting portal you’ll be presented with a series of fields to complete, of which you fill in as much as you feel is relevant – not every field is mandatory, but the more information you can give us the better. Although you’ll need to enter your email address to get access to the portal, none of your details are shared outside CHIRP, and we have our own independent secure database and IT systems to ensure confidentiality.
![]()



Rupert Dent
Drone/UAS Programme Manager
Contact:
-
DUASxx10
–

Initial Report
Source: AAIB Bulletin: 6/2023 DJI Mavic 2 Enterprise AAIB-28582The UAS was being used in an police operation over an abandoned building near a public car park and train station. During hover over the building, the aircraft’s motors stopped and the aircraft fell vertically with no prior warning to the remote pilot. The aircraft struck the roof of the building and the battery separated.
Recorded data indicated that the battery probably disconnected in flight. This could have been caused by the battery not having been fully latched prior to take-off, or the latching mechanism or battery being worn from repeated use, resulting in an in-flight disconnection. The operator has taken safety action to remind their pilots of the importance of pre-flight checks and checking airframe and battery condition at their base.
The recorded data indicates that the most likely cause was a loss of battery power to the aircraft which instantly cut off the motors and the link to the controller. The battery state of charge was 77% at the time and there had been no warnings related to the battery. Both the operator and the aircraft manufacturer concluded that the most likely cause was the battery becoming disconnected. The damage to the battery was consistent with it having separated when the aircraft struck the roof of the building, and this detachment was more likely if it was already loose.The operator believed that the pre-flight checks were probably rushed and that the body worn camera image showed the battery not fully engaged (see photo). The aircraft manufacturer could not confirm whether it was fully engaged, but it is possible that it was not. It is also possible that the battery was engaged at that time, but that the latching mechanism or battery were slightly worn from use which led to an in-flight disconnection. There was no indication that the battery was swollen or had exceeded the temperature limit. There are no sensors on the battery locking mechanism to detect and warn the pilot that a battery is not fully latched. For this type of UAS it is important that it is flown in a manner to reduce the risk to uninvolved third parties if it were to fall vertically, and in this case the aircraft was being flown over a large, abandoned building which reduced that risk.

The operator has shared the learning from this accident with all its UAS pilots and reminded them of their responsibility to turn on their body worn camera before they carry out the UAS pre-flight checks so that the checks are captured, and of their responsibility to take time on the UAS checks that are completed at a local air base to ensure the aircraft is fit for use. They also planned to reinforce the briefing of observers, and to carry out routine checks of the batteries.
CHIRP Comment
-
DUASxx11
–
Initial Report
During an aerial survey flight, the UAS detected a rapid loss of battery power and initiated an immediate automatic landing. Whilst descending, its flight behaviour became erratic, control was lost to the remote pilot, and the UA struck an uninvolved person before hitting the ground. The photograph shows the UA after falling to the ground.
It was not possible to determine a cause for the loss of battery power or the flight behaviour. There may have been an opportunity during flight control checks to consider unexpected battery discharge rate as a reason to abort the flight.
The flight was planned in accordance with applicable regulation and guidance for safe distances between the UA and uninvolved people and structures. Due to the erratic flight behaviour of the UA during its automatic landing, coupled with loss of flight control, the UA subsequently breached the required safe distances and then struck the construction worker. The battery was fully charged prior to the flight, was within the manufacturer’s recommended number of cycles, and no defects were found to have affected its chargeDuring flight, the battery percentage detected by the UAS dropped at an unexpectedly high rate that resulted in an automatic landing without notifying the pilot at the pre-set charge thresholds. The first indication of an abnormal battery discharge rate was during flight control checks. The pilot chose to continue with the planned flight as it would have been achievable using the indicated 88% battery level. Subsequently, the UAS continued to detect a high discharge rate which triggered the automatic landing. After the flight the battery integral charge level indicator showed 50-75% charge. It was not possible to determine the difference between this charge level and the battery power displayed on the handheld controller during the flight. Flight log data did not explain the discrepancy in battery level.

The UAS measured a high loss of battery power in a short space of time, leading to an uncontrolled landing where the distance between the UA and uninvolved people and structures was compromised. This sequence of events resulted in the UA striking an uninvolved person. It was not possible to determine a cause of the UA’s detecting a loss of battery power or its flight behaviour. Whilst the displayed level of power remaining was sufficient for the planned flight, there may have been an opportunity during flight control checks for the pilot to consider the abnormal battery discharge rate was likely to continue, and to abort the flight.
CHIRP Comment
-
DUAS22
–
Initial Report
CHIRP Comment
-
DUAS23
–
Initial Report
CHIRP Comment
-
DUASxx13
–
Initial Report
CHIRP Comment
-
DUASxx14
–
Initial Report
CHIRP Comment
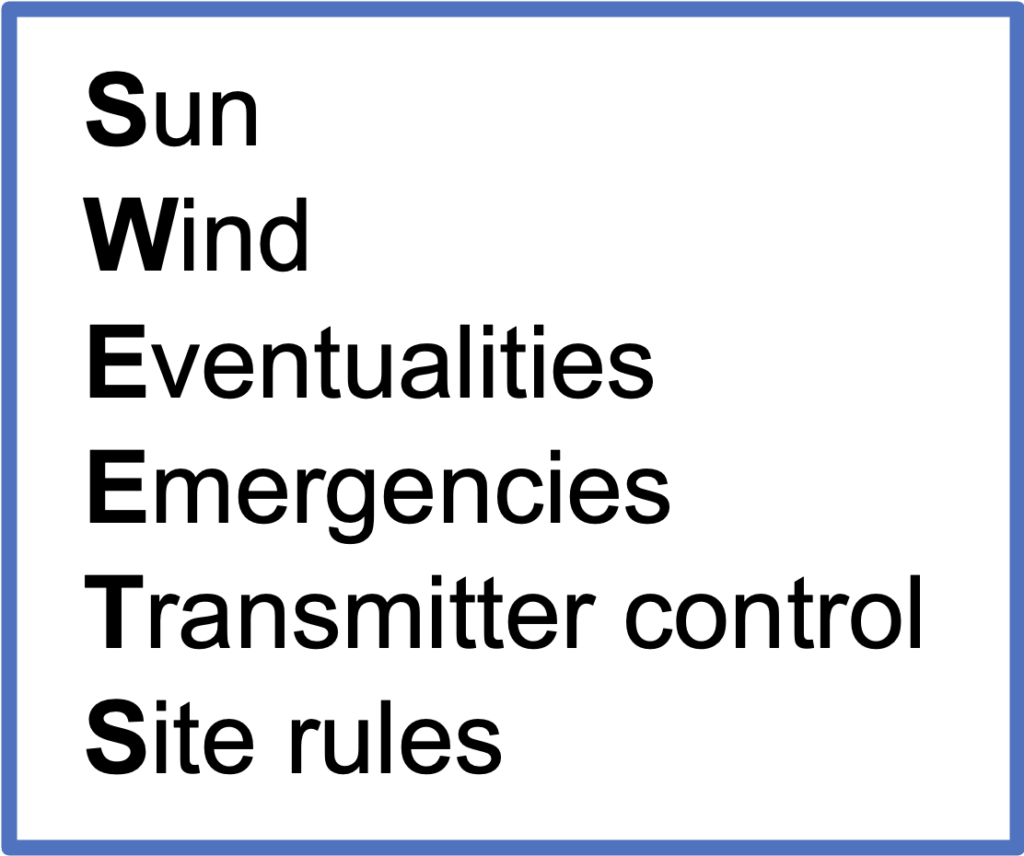
The consistency of reporting amongst modellers is excellent and almost certainly better than the Drone community. We do note a relatively high frequency of unintentional BVLOS flight that sometimes ends with the loss of the aircraft. An important point to note is that before you take off it is always useful to run through in your mind what actions you will take should you lose sight of your aircraft. The BMFA have recently updated guidance on this and suggest considering following the ‘SWEETS’ pre-flight checks that we think have relevance to drone operations and are worth considering.
When unintentional BVLOS happens to drone pilots, the fact that they often have controllers with screens and the aircraft mostly have cameras, FPV or otherwise, the occasions when the aircraft is recovered may be slightly higher.
Gliders are famously difficult to spot from a crewed aviation perspective largely because of their profile. Clearly this is also the case as far as models (and drones) are concerned. A blue sky with small patchy clouds is a difficult environment to fly in if the aircraft has a low profile and is as far away as 700ft. The orientation of its flight may be even more difficult if the aircraft is circling. We wonder whether a strobe would make any difference, or perhaps painting the aircraft in a more visible colour?